XZ-series Unmanned Helicopters OverviewAuthor: Garo MardirossianAuthor information:
Abstract: The unmanned helicopters and airplanes of the XZ-series have been in development for nine years by the beginning of 2018. A complete avionics system possessing distinguishable innovations was created. A number of unique novel models were introduced.
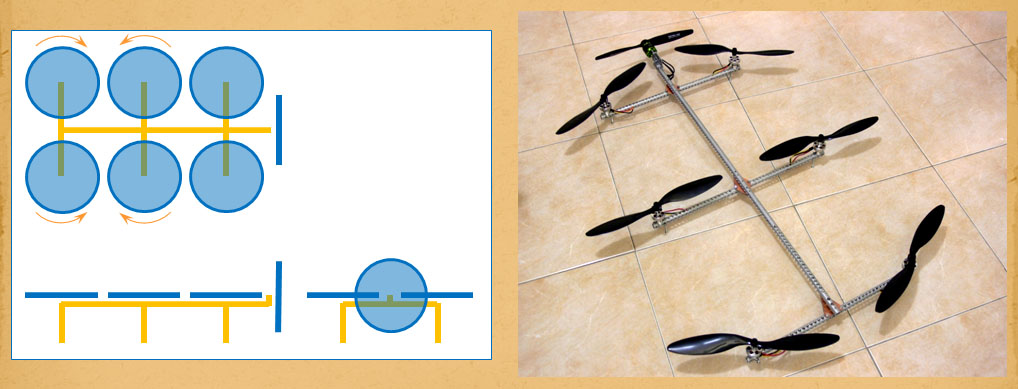
In the current material, most models of the series are based on the H-airframe structure raising novel features and benefits to the introduced aircraft. Further, a breakthrough approach of the compound multirotor helicopter is discussed and four such models of the XZ-series are described. The current paper aims at disclosing the benefits of the XZ-series helicopter models over the classical multi-rotors. Also, here, the reader will find analysis of the dynamical characteristics of the XZ-series airframes yielding increased mechanical rigidity, efficiency and maneuverability. Keywords: Unmanned multi-rotor helicopter, Multi-rotor helicopter airframe, Compound helicopter IntroductionThe importance of multi-rotor aircraft has increased enormously in the recent years and the need for innovations is getting more and more pressing. The presented XZ-series of unmanned multirotor aircraft was developed in the last nine years and includes quite a few models from multirotor helicopters through compound helicopters to vertical takeoff and landing fixed wing aerial vehicles. The current material examines the helicopter models of the XZ-series. The aircraft models will be covered in another publication. The current paper takes observation of currently existing aircraft models of the XZ-series. Novel models' features are described. The XZ-series multi-rotor helicopter modelsThe XZ-series models are novel. Most of the helicopter designs in the XZ-series are based on the H-airframe structure, which offers extraordinary benefits to the rigidity, flexibility, maneuverability, efficiency and weight of the aircraft. The following figure depicts the ubiquitous “Star”-topology multirotors used almost exclusively at present.
Figure 1. General view of "star"-topology multirotor aircraft with various number of propellers
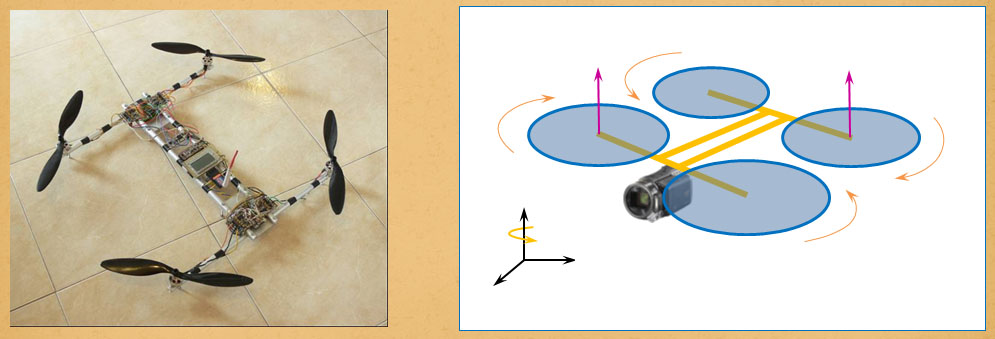
To compare with classic multi-rotor airframes the reader may examine Fig. 1 and Fig. 2. In contrast to the “star”-topology, the first model of the XZ-series, XZ-1, is based on the H-airframe, also called "fuselage" structure. XZ-1 may be observed in Fig. 2.
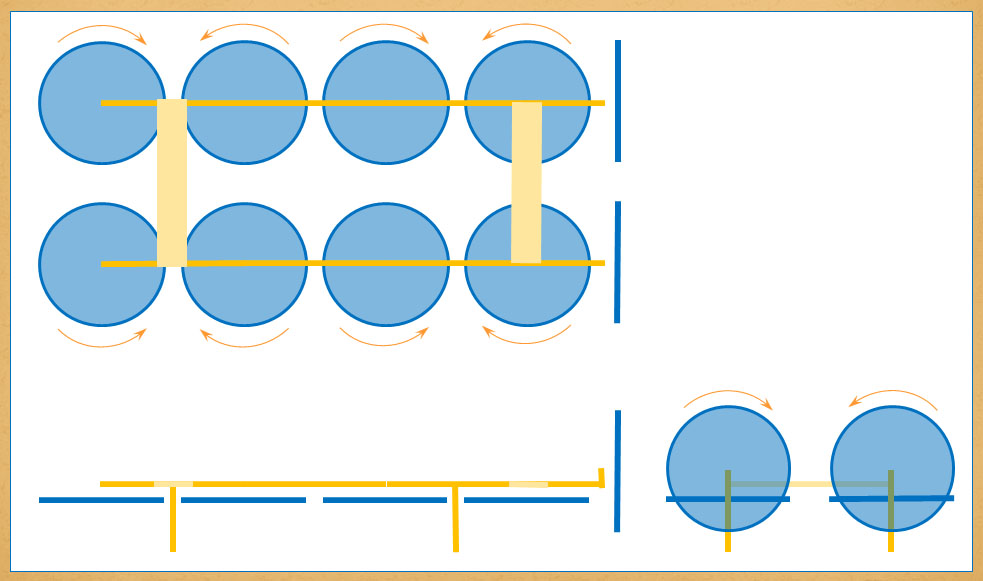
Figure 2. The first representative of the XZ-series — XZ-1 quad-rotor helicopter, based on the H-airframe structure
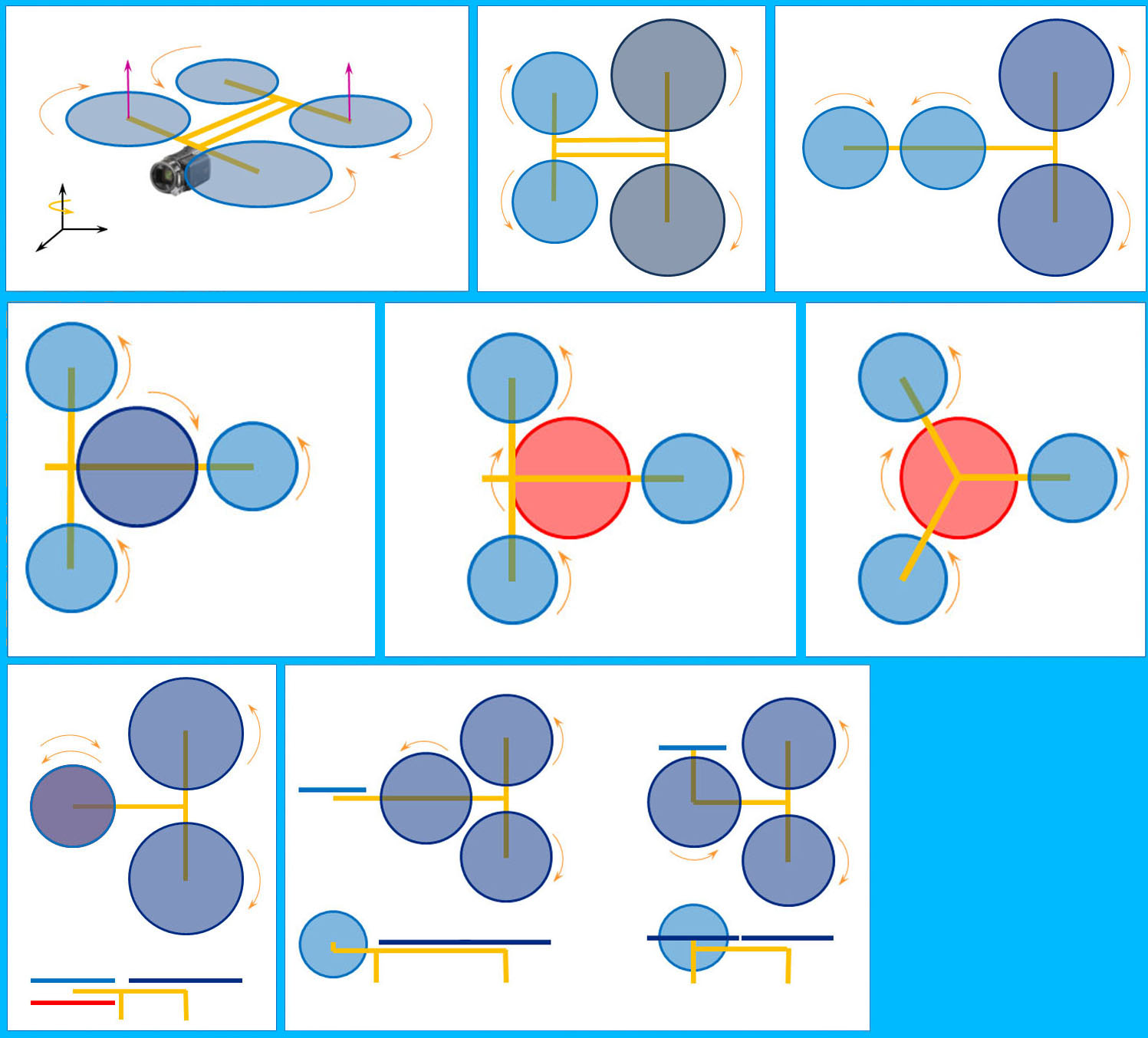
Why is the XZ-series starting with a quad-rotor? Theoretically, the minimum number of propellers a multirotor needs to fly without tilting mechanisms, control surfaces or cyclic and collective pitch control is four (Getsov et al, 2014). The simplest multirotor is hence the quad-rotor. The benefits of the quad-rotors are their low cost and simplicity. The quad-rotor models of the XZ-series are shown in Fig. 3.
Figure 3. Quad-rotor designs of the XZ-series. From left to right and from top to bottom: XZ-1, XZ-1B, XZ-1C, XZ-1D, XZ-1E, XZ-1F, XZ-1G, XZ-1H and XZ-1J.
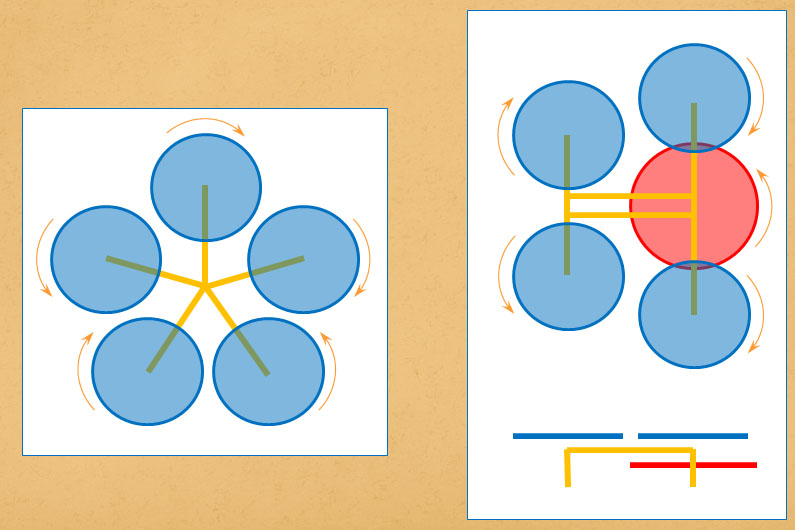
The next step in the XZ-series development was the quint-rotor helicopter. A comparison between a classic “star”-topology quint-rotor aircraft and XZ-series model XZ-1A is presented in Fig. 4. Again, XZ-1A is based on the H-airframe paradigm.
Figure 4. Quint-rotor designs: Classic quint-rotor helicopter (left) and XZ-1A (right).
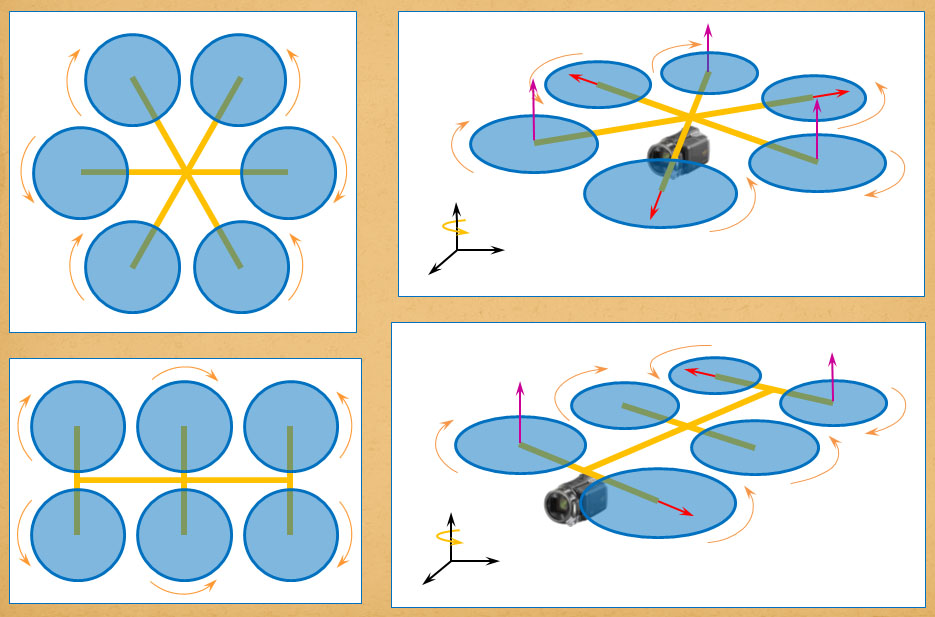
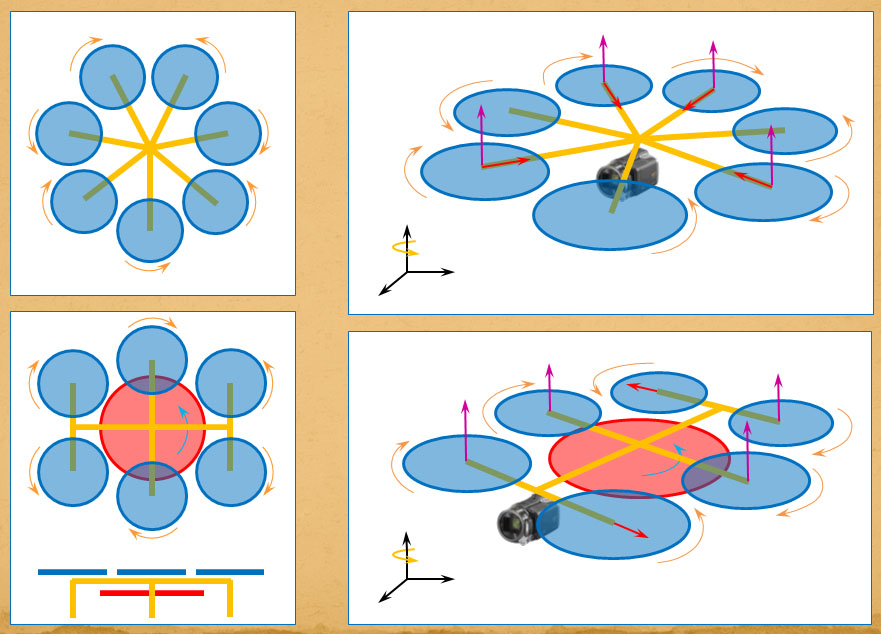
In Fig. 5 is presented a comparison between standard “star”-topology hex-rotor helicopters with the XZ-5, while in Fig. 6 a comparison between the classic "star"-topology of a septa-rotor helicopter with the XZ-5A model can be observed.
Figure 5. Classic hex-rotor helicopter (top) and XZ-5 (bottom)
Figure 6. Classic septa-rotor helicopter (top) and XZ-5A (bottom)
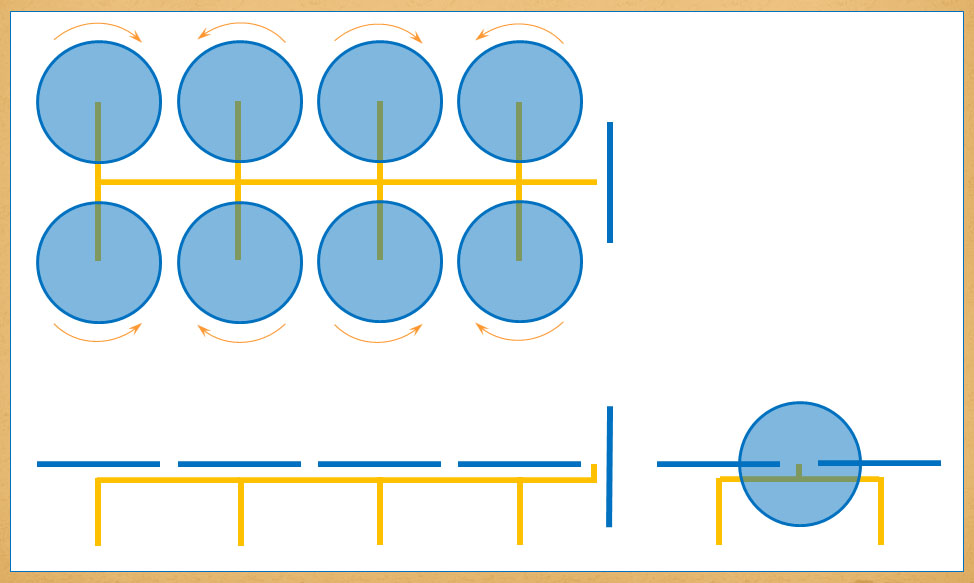
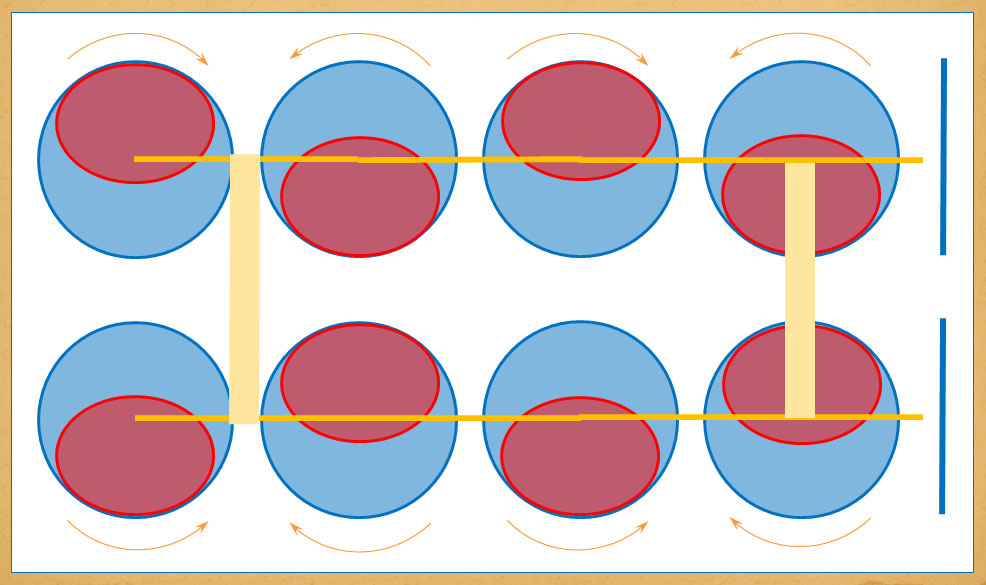
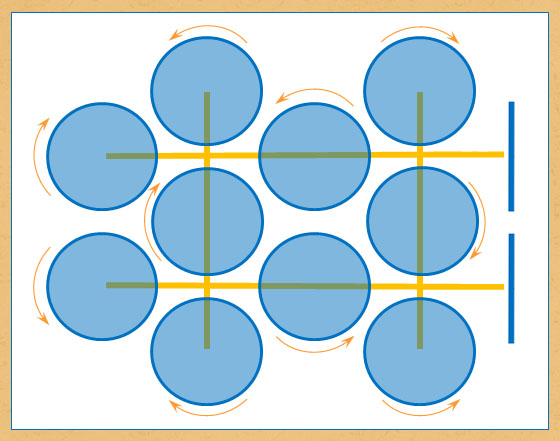
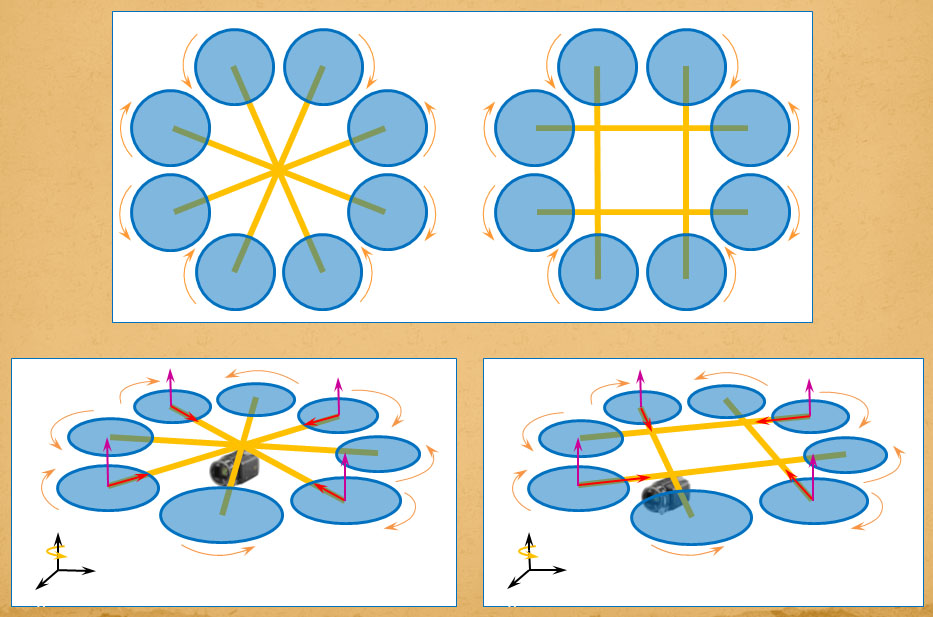
Octo-rotors are well suited for larger payloads and exhibit higher safety levels. There are two wide spread topologies of octo-rotors, which are shown in Fig. 7 — on the left a classic octo-rotor helicopter based on the “star”-topology is shown and on the right — a classic octo-rotor helicopter based on the “square”-topology is presented.
Figure 7. Classic octo-rotor helicopters: "star"-topology on the left and "square"-topology on the right.
The XZ-series offers two octo-rotor models. Fig. 8 presents the H-airframe based model.
Figure 8. XZ-2 octo-rotor helicopter based on the H-airframe paradigm
Fig. 9 presents the torsion resistant airframe model, which has increased rigidity and less weight than its competitors.
Figure 9. XZ-3 torsion resistant octo-rotor helicopter
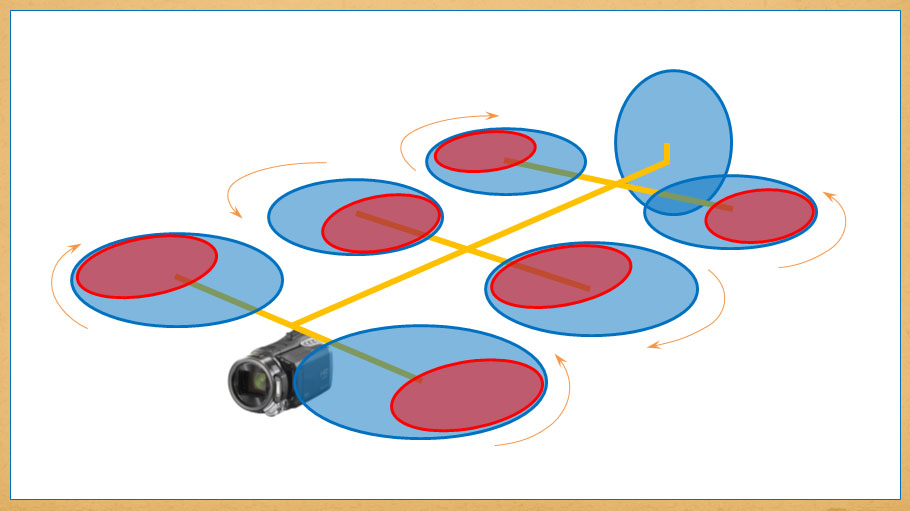
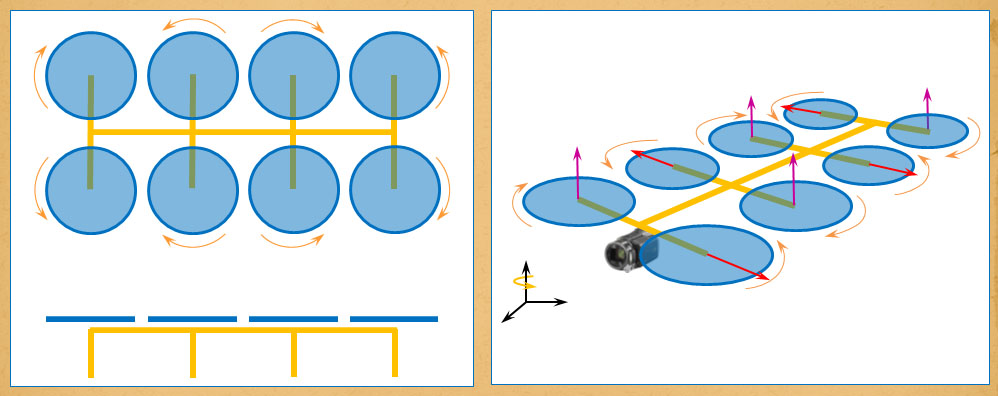
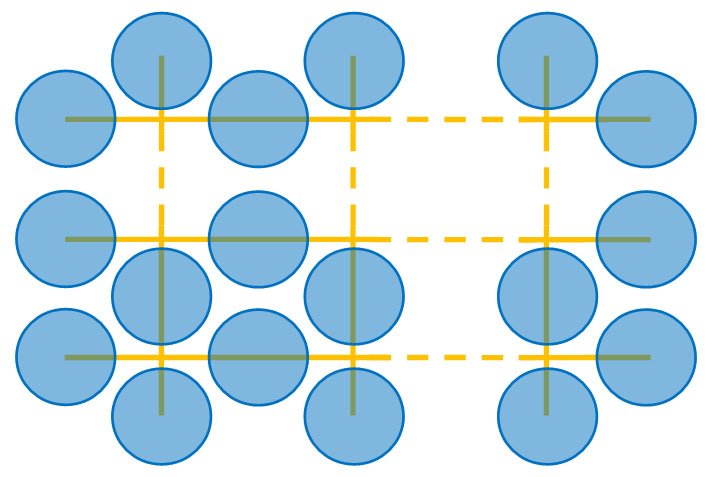
The XZ-series goes further. The next step is the XZ-6, which is a dodeca-rotor aircraft. It realizes extraordinary lifting capabilities utilizing the lifting power and optimal coverage of a 12-rotor design that guarantees the highest efficiency among all dodeca-copters present. XZ-6 is shown in Fig. 10.
Figure 10. XZ-6 dodeca-copter design utilizing optimal rotor coverage and optimal airframe construction
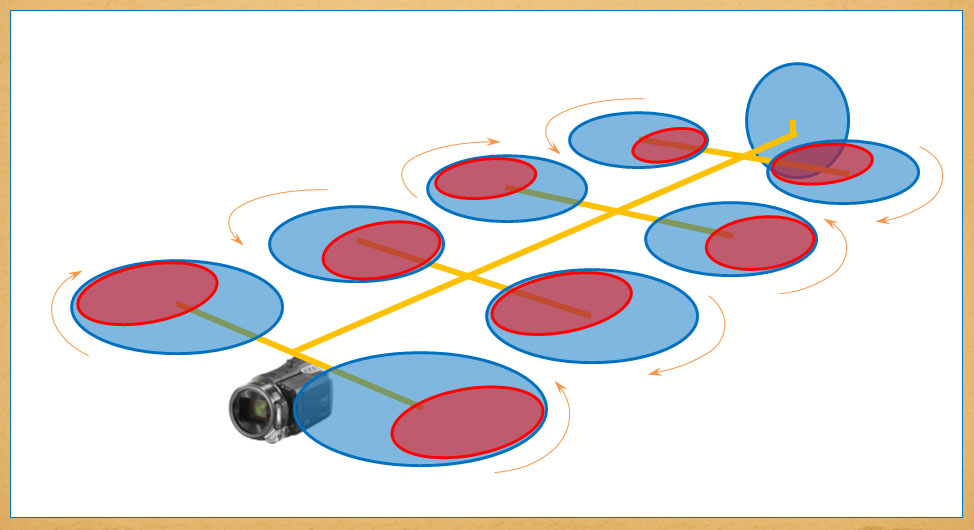
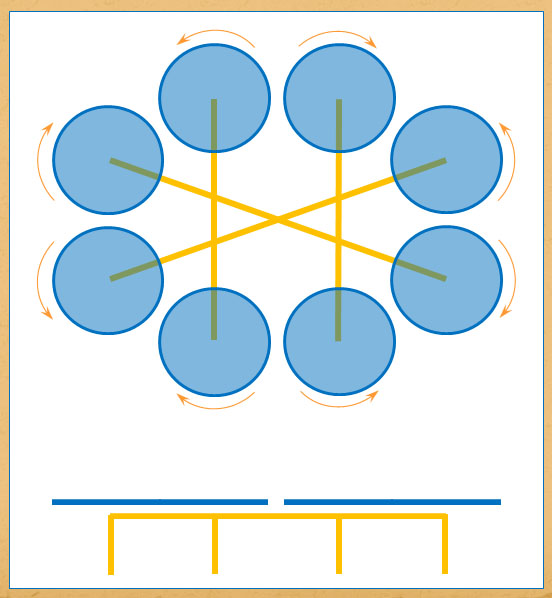
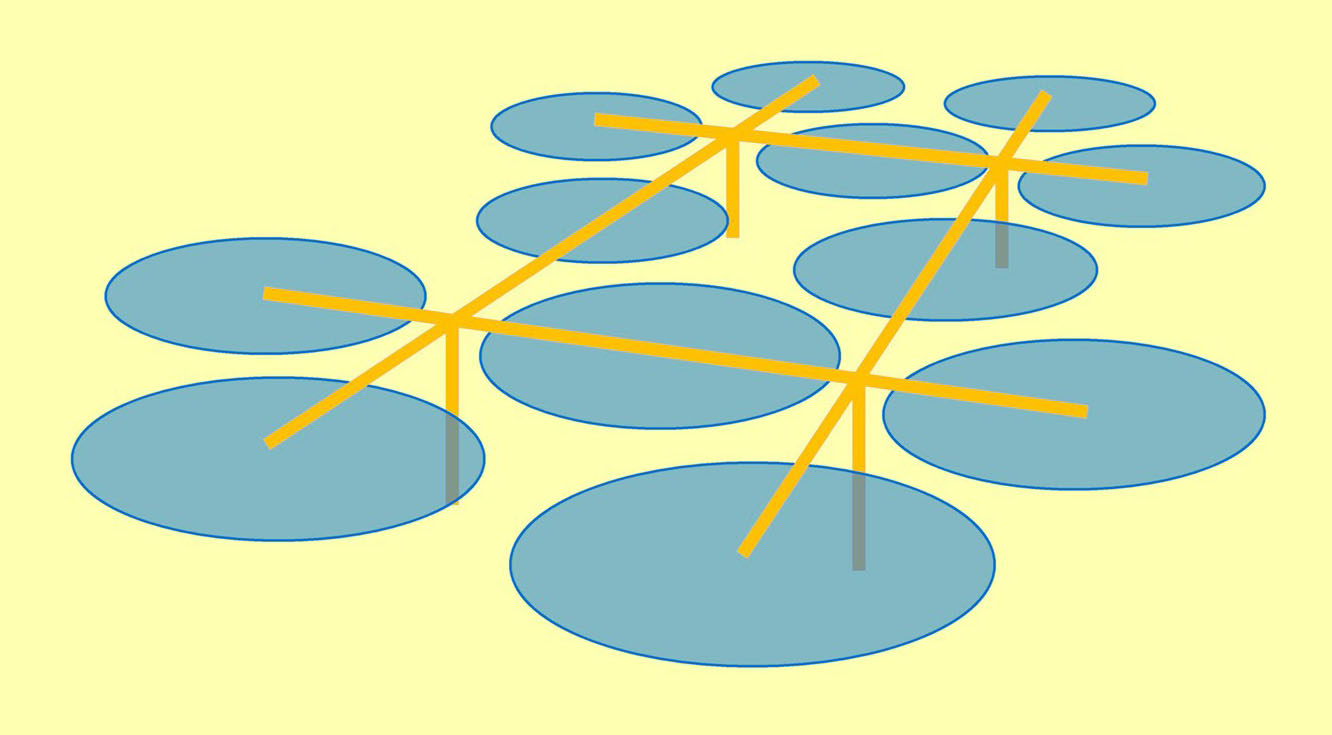
A further improvement from XZ-6 is the XZ-7 "Bulgarian Knight" dodeca-copter shown in Fig. 11. It follows the topology of XZ-6 but having its rotors mounted below the airframe decreases significantly the parasitic drag of the airflow created by the rotors against the airframe.
Figure 11. XZ-7 "Bulgarian Knight" dodeca-copter design utilizing optimal rotor coverage airframe construction accompanied by rotors mounted below the airframe
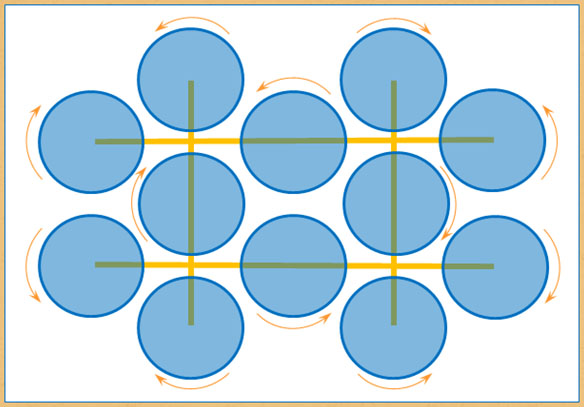
The XZ-6 and XZ-7 helicopters are just the “little brothers” of the optimal coverage helicopters multitude. The generalized multitude optimal coverage multi-rotor aircraft are presented in Fig. 12. The model designation of this optimal coverage family of helicopters is XZ-7-n-m. The n and m indices in the model designation denote respectively the number of rows and columns of beams making up the airframe. XZ-7-2-2 is equivalent to XZ-7 Bulgarian Knight. The XZ-7-n-m family of helicopters has its rotors below the airframe.
Figure 12. XZ-7-n-m Optimal coverage helicopter family. The n and m indices in the model designation denote respectively the number of rows and columns of beams making up the airframe.
Compound helicopters of the XZ-seriesThe compound helicopters are a cutting-edge technology that encompasses the vertical takeoff and landing capabilities of the normal helicopters and the fast horizontal flight speed of the fixed wing aircraft (Zabunov et al, 2014a). Fig. 13 shows the modern manned compound helicopters.
Table 1. Compound helicopter models
The compound helicopters of the XZ-series realize the idea of the compound helicopter to the small scale UAV avenue combining vertical pusher propellers technology with the existing unique airframes of the XZ suite of aircraft.
Figure 13. XZ-series compound helicopter XZ-5B
The helicopter in Fig. 13 is the XZ-5B multirotor aircraft. It uses 6 propellers for lift and one as a pusher propeller to attain high speed. Fig. 14 depicts model XZ-2A.
Figure 14. XZ-series compound helicopter XZ-2A
The latter model differs from XZ-5B in the number of horizontal rotors — it uses eight instead of six rotors.
Figure 15. XZ-series compound helicopter XZ-2B
Fig. 15 presents model XZ-2B. It uses an H-airframe for increased stability. The H-airframe also delivers the possibility to mount two pusher propellers instead of one that are counter rotating. In this manner XZ-2B enjoys better rigidity, lighter weight and higher maximum horizontal speed than the former models.
Figure 16. XZ-series compound helicopter XZ-6A
Finally, XZ-6A is a derivative from XZ-7 with two of the horizontal rotors removed and having two pusher propellers mounted on the two beams' ends. ConclusionsThe XZ-series of unmanned aerial vehicles (UAVs) is a growing conglomerate of models based on novel ideas. The series is versatile, covering various needs for UAV implementation and acquiring indubitable superiority over the competitive UAV systems. References
|
 garo.mardirossian
garo.mardirossian gmail.com
gmail.com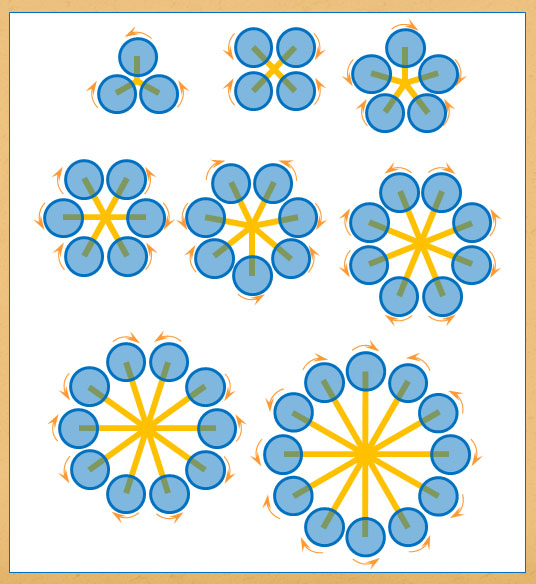
.jpg)
_(cropped).jpg)