Modern Methods
|
 rberberova
rberberova nbu.bg
nbu.bg
|
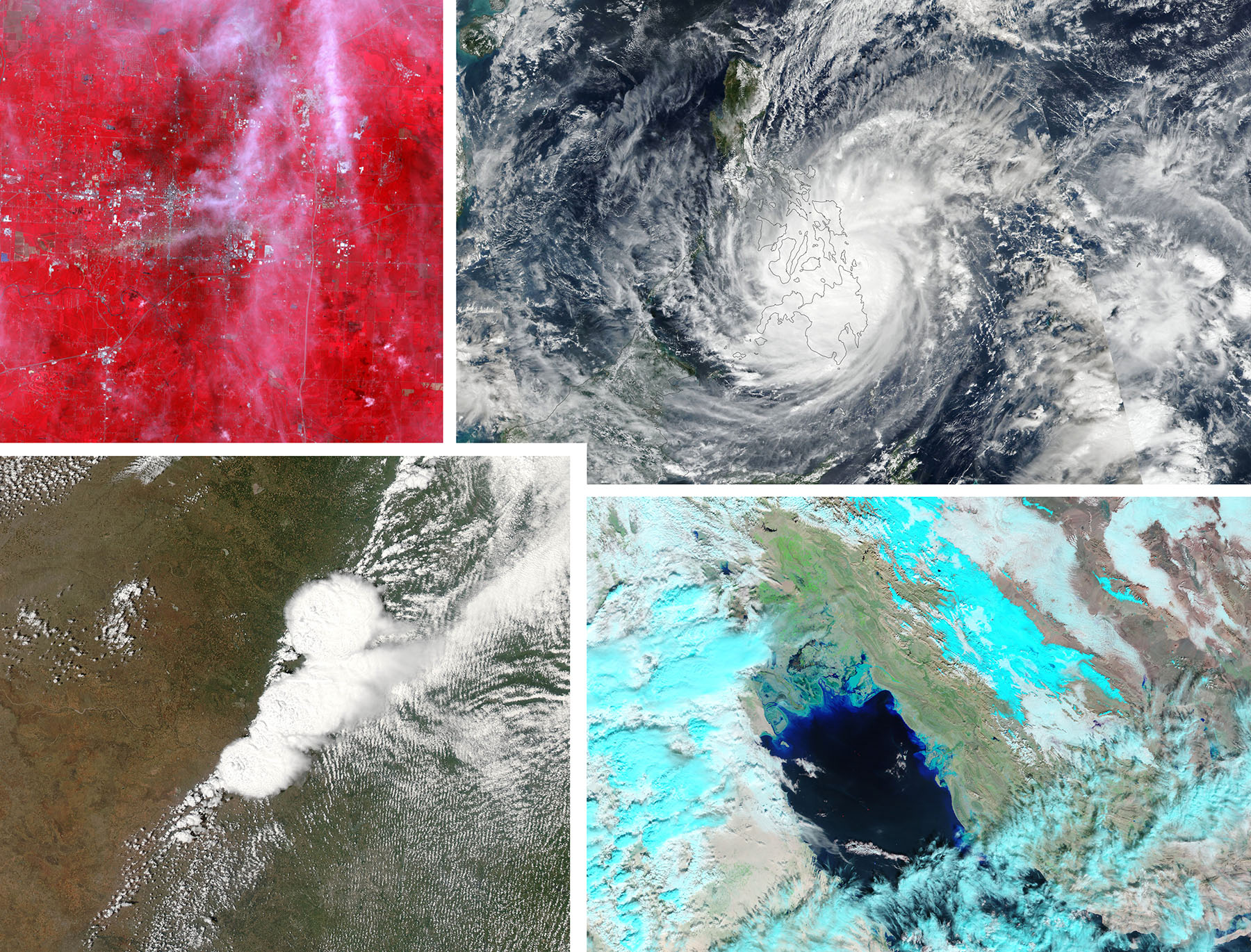
Figure 1. Natural disasters photographed from Space. Top-left: Supercell thunderstorm over Joplin, USA, (May 22, 2011). The supercell spawned an EF-5 tornado with winds higher than 300 km/h. Taken by Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) on NASA’s Terra satellite (image in false-colour); Top-right: Typhoon Rai over Philippines (category 5), December 16, 2021, taken from Visible Infrared Imaging Radiometer Suite (VIIRS) on the Suomi-NPP satellite; Bottom-left: Supercell thunderstorm in Oklahoma, USA, spawned a destructive tornado that passed just south of Oklahoma City (On May 20, 2013). Taken by Moderate Resolution Imaging Spectroradiometer (MODIS) on NASA’s Aqua satellite. Image in natural-colour; Bottom-right: South-eastern Iraq flood by Moderate Resolution Imaging Spectroradiometer (MODIS), January 12, 2004. Images from NASA, © public domain.
Anthropogenic, or human, activity is related to both development of the industrial sector and urbanization. Without the latter two processes it would be difficult to assess the progress of human society, but by abusing them through reckless, flawed and criminal strategies, anthropogenic catastrophes are invoked. Namely, these are chemical, biological, radioactive, and other types of pollution of the atmosphere, soil, water basins, etc. The accidents are generally related to and take place in malfunctioning technological processes or are consequences of accidents in facilities used for chemical manufacturing, energy production, transport, biotechnologies, nuclear power plants, etc. It is expected that such accidents would take place during military conflicts when the negative impact on the environment is deliberate. Despite the constant technology improvement and scientific advances, environmental accidents of anthropogenic origin pose a significant threat to human health and life. These disasters also cause serious material damage.
Major trends in environmental disasters management
The major directions in management of environmental disasters are (Berberova, 2012; Getsov, 2014; Kostova, Berberova, 2009; Mardirossian, 2020):
- Study and monitoring - the study and monitoring of natural and / or anthropogenic processes and phenomena are the prerequisites for good management related to reducing the consequences of environmental disasters - human casualties, economic damage and social effects.
- Prediction – all devices, systems, knowledge, education of the population, activities, and research aimed at preliminary assessment of the risks and probabilities of environmental disaster occurrence.
- Prevention – organized activities aimed at reducing the risk of such events happening. All needed actions must be undertaken before the accidents have taken place. To achieve preventive effect society must be prepared for them having experts that are established and well prepared scientifically and practically in this matter. Further, preventive measures may include education of the population, infrastructural projects, critical facilities surveillance, regular testing, technical analysis, personnel selection and continuous education.
- Tracking of processes – the actions undertaken for the purpose of collecting data about precursor events or disasters currently taking place. These activities are realized using people involved in certain tasks or developed technological methods based on devices for tracking, storing and sending the information remotely to centres for analysis.
- Active intervention – such activities are mostly evident when the accident has already taken place. Often large parts of the population are involved. It is not a good sign of successful preparation if the situation has reached this stage of disaster management, but some events are impossible to predict and circumvent, and disasters do happen. Once the event is underway, minimization of damages and casualties is the primary objective. Further, the decrease of pollution that may influence human life and natural environment in future years is a concern.
- Rescue operations – when, through active intervention, the disaster is impossible to bring under control and groups of people or single individuals are affected and at risk, rescue operations may be undertaken in order to evacuate the endangered humans from the scene of the disaster.
- Reconstruction and restoration measures – when finally the disaster has been contained and put under control, reconstruction of the damaged infrastructure and natural resources might took place. Such activities don’t always come to fruition as the pollution might be so intense, or physically and chemically hard or even impossible to clean, that only time and natural processes are capable of eliminating the consequences of the accident.
In respect to modern methods of disaster management we elaborate on certain aspects of some of the most significant threats to the population in regard to the circumstances and facts related to the conditions in Bulgaria and the processes and facilities posing greatest risk to public health in the country.
It is well known that Bulgaria is a producer and exporter of atomic power plant electricity. The cost for this production and revenue the state realizes is mostly concentrated in the risk of an accident with our nuclear power plant. Such risks are associated with human factors, both non-intentional and deliberate, such as technology malfunction, human errors in maintenance and exploitation processes, terrorist attacks, etc.
Another field of risk for the health of the population is the pollution of the air and food by industry, households and vehicles. Large cities in Bulgaria suffer from high levels of air pollutants and the resultant diseases of the respiratory system (Pamukoff-Michelson, 2020), such as asthma (Mihaylov and Pamukoff – Michelson, 2021). Food pollutants are affecting the metabolism, causing obesity (Pamukoff-Michelson, 2021B; Pamukova, 2017; Pamukova, 2016A; Pamukova, 2016C), etc. Certain preventive measures are possible by the application of complex preventive programmes (Pamukoff-Michelson, 2021B; Pamukova, 2017; Pamukova, 2016A; Pamukova, 2016B; Pamukova, 2016D) in addition to modern technology for monitoring and collecting pollutant data, mapping of the data and locating the major culprits. There are methods of counteracting these pollution factors to a certain extent in the cases where there are no effective measures against the environmental polluters.
The current article presents some anthropogenic disaster management methods and technological means developed at the Space Research and Technology Institute – Bulgarian Academy of Sciences. Most of these innovations and inventions are protected by patents, registered at the Bulgarian Patent Office.
Modern methods in environmental disasters and anthropogenic accidents management overview
Following the need for disaster management of certain high risk scenarios relevant to Bulgaria, teams at the Space Research and Technology Institute – Bulgarian Academy of Sciences have invented, patented, published and tested a number of novel technologies related both to management of disasters linked to ionizing radiation related accidents and pollution of the atmosphere by sources of anthropogenic origin. The latter are mostly endangering the big cities in the country and putting at risk the health of the population in these large urban areas.
Starting with the radiation hazards, we must establish that the problem is not unique to our country, but is a global one due to the increased worldwide interest in nuclear power plants electricity production taking place lately. This trend became more pronounced after it became evident that the solar and wind power plants are unable to deliver the required electricity for the industry and households in the countries with high electricity demand. Thus the risk from disasters in nuclear facilities in many countries and all consequential threats to public health is increasing. It should be understood that not only nuclear power plants pose this risk, but also nuclear fuel enrichment factories, storage stations and depots for spent nuclear fuel and nuclear waste, radioactive ore mining, and even facilities not related to nuclear power production such as employment of nuclear isotopes in medicine (Gjurov and Berberova, 2008; Gjurov et al., 2008; Garcia-Sanchez et al., 2018; Seco et al., 2014).
During a nuclear industry related accident, the major risk for the public is the uncontrolled spread of radioactive material. The spread of radioactive content may be restricted to the facility perimeter or may reach beyond to vast areas. Most dangerous are those disasters that release the radioactive materials into the air or in water basins thus enabling the transport of the pollutants to large areas and distant places, making the direction of the spread hard or impossible to predict in advance.
Most severe accidents of that kind were the Fukushima Daiichi nuclear disaster from 2011 (Kawatsuma et al., 2012) and the Chernobyl disaster from 1986 (Berger, 2010). Both events were of catastrophic character, involved explosions and spread of radioactive fallout and isotopes over a wide area, in the sea and in the atmosphere polluting a large geographical region. Both accidents are classified as level 7 events – the highest grade by the International scale for atomic and radioactive events (INES) (Mardirossian, 2020).

|
Figure 2. Fukushima accident site. Top – IAEA experts depart Unit 4 of TEPCO's Fukushima Daiichi Nuclear Power Station on 17 April 2013 as part of a mission to review Japan's plans to decommission the facility. Photo Credit: Greg Webb / IAEA, by IAEA Imagebank – https://www.flickr.com/photos/iaea_imagebank/8657963646/, CC BY-SA 2.0, https://commons.wikimedia.org/w/index.php?curid=56218685; Bottom – IAEA fact-finding team leader Mike Weightman examines Reactor Unit 3 at the Fukushima Daiichi Nuclear Power Plant on 27 May 2011 to assess tsunami damage and study nuclear safety lessons that could be learned from the accident. Photo Credit: Greg Webb / IAEA, by IAEA Imagebank – https://www.flickr.com/photos/iaea_imagebank/5765324940/, CC BY-SA 2.0, https://creativecommons.org/licenses/by-sa/2.0, via Wikimedia Commons.
In most scenarios, the closer to the accident, the higher the radiation levels. Any management activities involving people are not recommended due to health hazards, therefore various automated vehicles are often implemented. Specifically the Fukushima Daiichi accident started intensive scientific research into technologies and systems capable of substituting human presence in the contaminated areas for carrying out different tasks of radiation measurement, localization of radioactive material dissemination, clearing routes and removing obstacles and debris, preventing further aggravation of the situation by enclosing the radioactive matter into a special sarcophagus, management of water flow to and from contaminated areas, decreasing of the processes that lead to further radioactive spread and decay. Such unmanned automated systems include ground-based vehicles, flying drones (Nex and Remondino, 2019) and sailing vessels. These three kinds of vehicles have their benefits and shortcomings with in regard to specific circumstances. For surveying in confined spaces one could use very small (under 250 g total weight) unmanned aerial vehicles (UAVs) (Khosiawan and Nielsen, 2016) or small to medium sized (up to 100 kg total weight) ground vehicles. When the interiors of buildings had suffered severe damage it is preferable that micro drones are deployed. On the other hand, ground vehicles are advantageous in less destroyed flat floor places where it is undesirable to induce air turbulence by the drone propellers.
There are quite a few ground-based unmanned platforms with the above purpose covered in the scientific literature. The CARMA 2 platform (Bird et al., 2019) is a medium to large ground-based four wheel vehicle for surveying ionizing radiation (Lauria, M. et al. 2006). Its dimensions are 830x440x1030 mm and its ground clearance is 65 mm. The vehicle offers a battery life of up to 4 hours. The inventors of the CAMRA 2 system predict a high probability of the failure induced by high γ-dose background radiation as the one observed during the Fukushima Daiichi disaster. A higher resistance to γ-radiation is preferable.
Another system that has been deployed in the Fukushima Daiichi site used for γ-surveying was the JAEA-3 (Kawatsuma et al., 2017). A different example is the Quince robot (Nagatani et al., 2013). While JAEA-3 is a four wheeled ground vehicle and carries a gamma ray imaging and measurement sensor called (Gamma Eye), Quince is a tracked vehicle. JAEA-3 total weight is 70 kg as the Quince’s one is 50 kg. The latter system employs a dosimeter CPXANRFA-30 by Fuji Electric Co., Ltd.
Still another system is the proposed by Chaiyasoonthom et al., 2015. This is a tracked vehicle carrying a Geiger Müller tube-based sensor for ionizing radiation. The apparatus is surveying for γ- and β-surveying rays. Another system is the one suggested and developed by Zakaria et al., 2016. The authors worked on a three wheeled platform equipped with a Geiger Müller tube type of sensor.
A tracked vehicle is developed by Kim et al., 2017, while a three wheeled robot is offered in a US patent by Dudar et al., 1994.
There exists a pronounced diversity of radiological surveying ground-based unmanned systems. Most such devices have unprotected electronics with regard to radiation hardening and radiation resistance (Bird et al., 2019). It is beyond any doubt that electronics being vulnerable to ionizing radiation yield frequent failure. There is another often observed shortcoming of the existing apparatuses – they exhibit large total weight making them difficult to carry by personnel. This problem coupled with the high probability of failure means a problematic delivery and deployment of the vehicles on site, predetermines a costly exploitation of the system, and finally renders the whole process highly inefficient.
Apart from the Fukushima Daiichi experience, the knowledge gathered during the Chernobyl disaster should be noted. A partially successful experiment was carried out using the Lunokhod vehicles (Zarowny, 2011). These robots, in contrast to many other contemporary devices, had their electronics radiation hardened (Leite et al., 2017) and were protected from the radiation levels experienced on the Moon. Nevertheless, the extreme radiation at the Chernobyl site was way more destructive resulting in the two deployed machines failing in the course of their work in the Chernobyl ruins (Anderson, 1990).

|
Figure 3. Chernobyl accident site on 1st of May 1986 (Première image publique de la catastrophe de Tchernobyl prise le 1er mai 1986 par le satellite SPOT-1). By Images SPOT acquises dans le cadre du programme Spot World Héritage du CNES - https://regards.cnes.fr/user/swh/modules/58?d=URN%3AAIP%3ADATA%3Aswh%3A0dcd80ce-145b-3b0f-97e5-5da2b521c666%3AV1&eds=PARAMETERS&rt=DATA&t=DESCRIPTION, Licence Ouverte, https://commons.wikimedia.org/w/index.php?curid=106847626
In the field of airborne unmanned systems used for radiological surveying and mapping there is a good overview made by Connor et al., 2016. In this research all drones have total weight higher than 1 kg. Such machines are not applicable to indoor implementation (Molina et al., 2018) with the exception of one system, namely the device proposed by Boudergui et al., 2011. It consists of a 0.9 kg indoor flying UAV. For the purpose of radiological observations it carries two different sensors – one weighing 20 g and the other having weight of 70 g. The suggested drone has standard quadcopter design (Croon and Wagter, 2018). There are plenty of outdoor flying designs such as the one by Martin et al., 2016. Their proposal may be implemented in radiological mapping tasks of the environment. The employed ionizing radiation sensor is heavier than the one used in indoors surveying and has a weight of 200 g. The total weight of the UAV is 7 kg. It is navigated by an autopilot and a GPS system.
Among the drone solutions there are also fixed wing systems. Their benefits are the covering of large areas. They also cope well with the wind and are deployable in harsh conditions. Such an example is the one proposed by Connor et al., 2020. Another similar platform was proposed by Mochizuki et al., 2017. Not surprisingly, their system is designed to be used at the Fukushima-Daiichi accident site. The payload is a compact Compton camera with weight of 1.9 kg.
Designs proposed by teams at the Space Research and Technology Institute – Bulgarian Academy of Sciences
The Space Research and Technology Institute at the Bulgarian Academy of Sciences has proposed a novel system for ground-based support in managing radiation disasters. The system offers specific advantages such as making the ionizing radiation sensor vibration-proof (Zabunov et al., 2021B), lowering the total cost and weight of the vehicles, increasing the life of the batteries, etc.
|
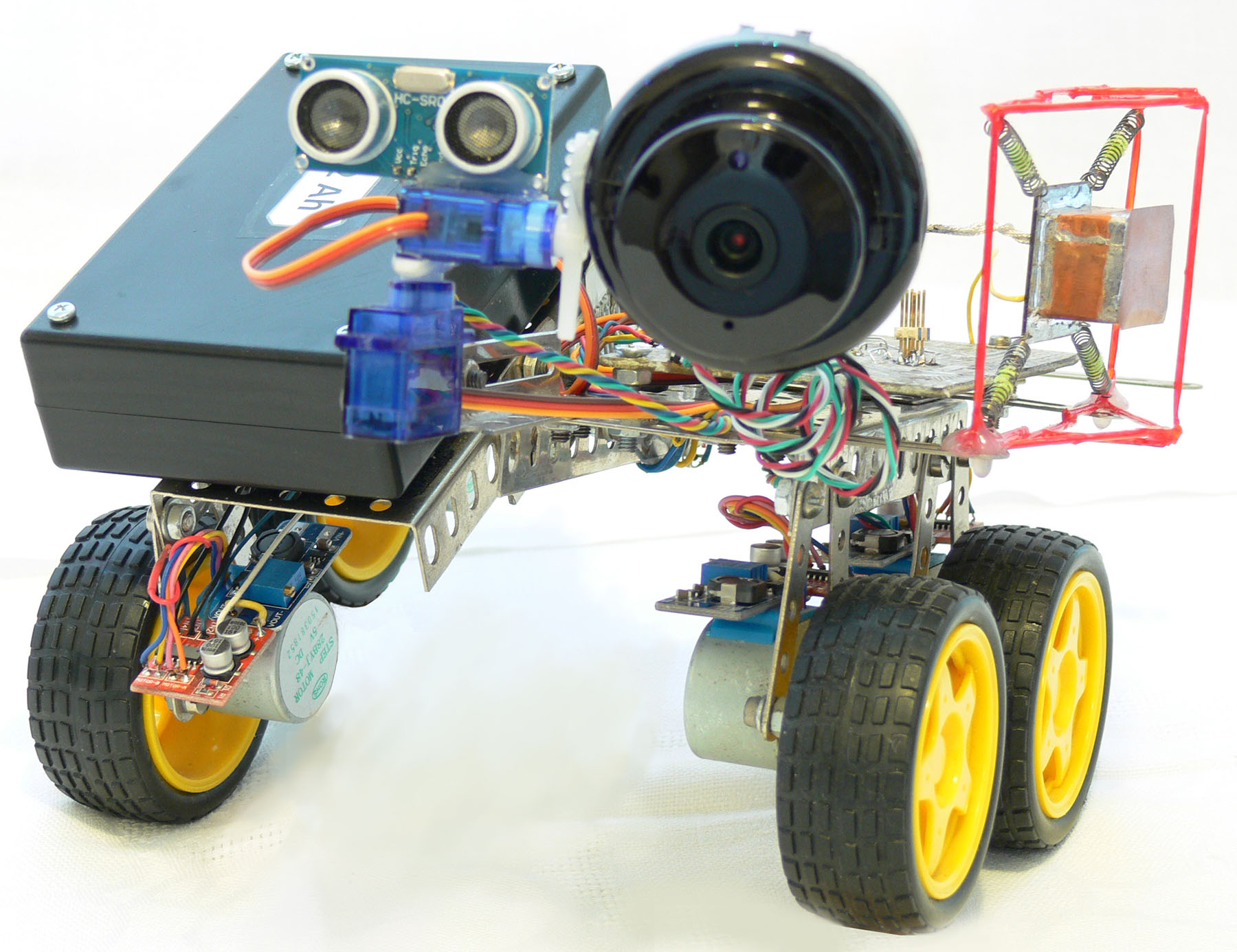
Figure 4. A mobile unmanned platform for ground-based radiation surveying developed at the Space Research and Technology Institute – Bulgarian Academy of Sciences. The radiological sensor is suspended on a frame using springs. Dimensions of the testbed: 300×250×170 mm. Total weight: 1.11 kg. Image © Space Research and Technology Institute – Bulgarian Academy of Sciences.
The lower the cost of the system, the larger the maximum number of vehicles that can be deployed in a disaster scenario with funding being constant. Likewise, each ground vehicle becomes disposable when the environment is contaminated with high intensity radiation material. Off-the-shelf components and radiation resistant microprocessor make maintenance easy and failure rate low. Having small vehicle dimensions of only 300×250×170 mm and total weight of 1.11 kg the ground-based platform is easy to transport, deploy and store. This system relies on Wi Fi communication enabling it as an Internet of Things device.
The vehicle is capable of operating for a few hours without battery charging or swapping. Detection of different types of ionizing radiation is possible such as gamma rays, beta particles, neutrons (Spurný, 2005), accelerated heavy charged ions, etc. (Ashida et al., 2018) The ionizing radiation instrument carried on board of the vehicle works as dosimeter, but also exhibits spectrometric capabilities and is suitable for radiation source identification.
The pivoted suspension and the implementation of portal axles increases the ground clearance and the negotiability of the vehicle on rough terrain.
The Space Research and Technology Institute has long experience in building dosimetry instruments for Space (Semkova et al. 2018; Spur and Dachev, 2003), nevertheless the presented innovation has its sensor designed from the ground up.
Another invention by the Space Research and Technology Institute is a drone for radiological surveying within buildings. Thorough scientific research demonstrates that there are only few existing flying platforms suitable for radiological surveying indoors (Boudergui et al., 2011; Battsengel, G. et al., 2020). All such solutions are developed around commercial drones and off-the-shelf radiological instruments that were mounted on these UAVs as payload. Although such an approach guarantees fast results, it is not versatile and does not solve specific tasks with high requirements for detection. In addition, localization of radiation sources inside buildings demands specialized designs.
|
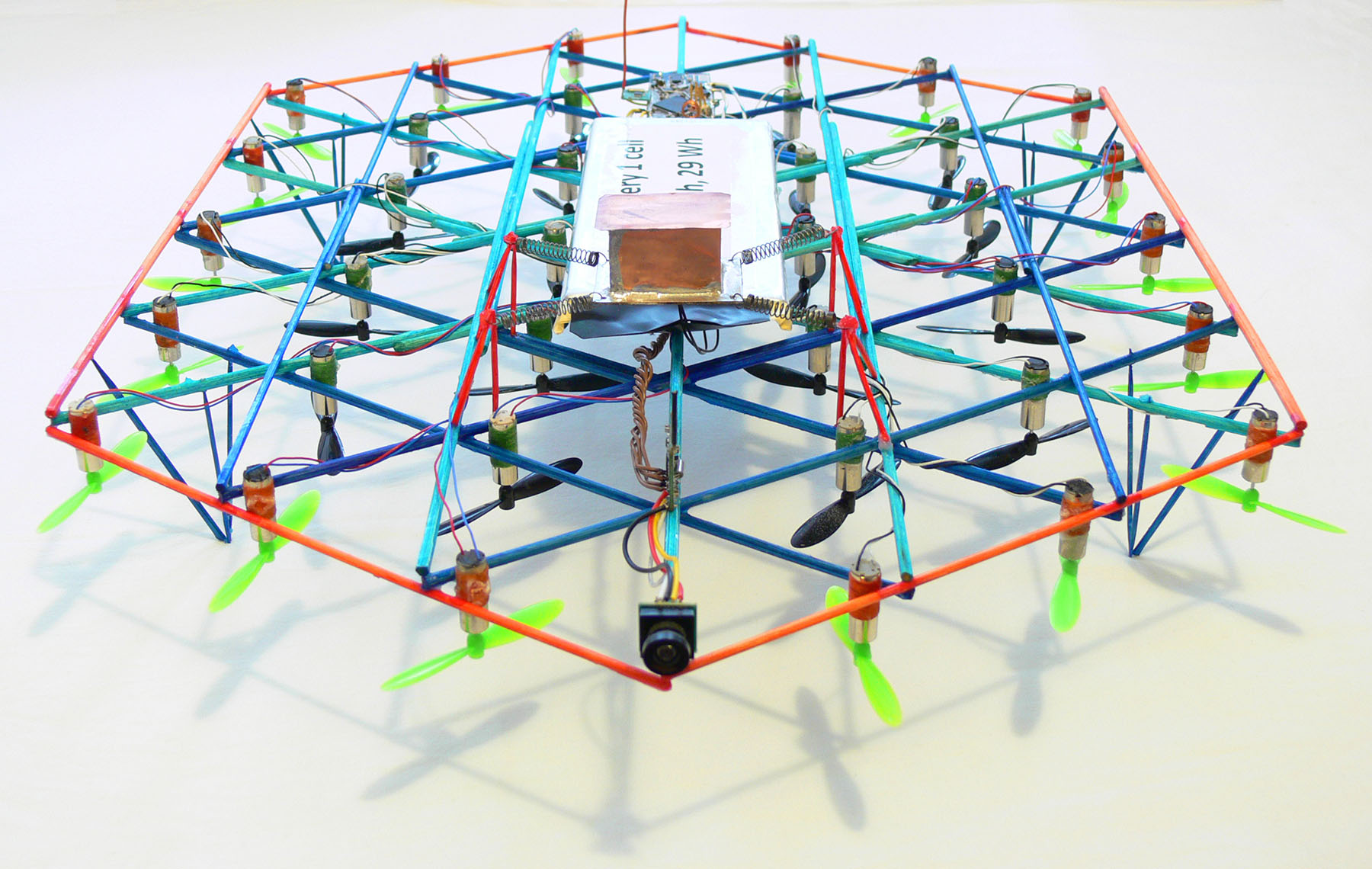
Figure 5. Innovative radiological drone design – a 36-rotor drone having its rotors positioned in a honeycomb geometric covering. Image © Space Research and Technology Institute – Bulgarian Academy of Sciences.
Although most of the present radiological UAVs are developed around non-radiation hardened or radiation resistant electronics, they tend to have high costs (Bird et al., 2019). An expected high failure rate due to non-protected electronics combined with high unit costs renders projects using such technology not very promising when deployed in harsh scenarios.
It became clear from the current technology overview that the lightest platforms are quite heavy – total weight of 0.9 kg. In comparison to these shortcomings of present day technology the proposed solution by the Space Research and Technology Institute tries to solve these problems by presenting a novel multi-rotor drone specifically designed and built for radiological surveying carried out indoors.
The flying vehicle is electrically powered and employs 36 rotors mounted under the fuselage (Yoon et al., 2017; Theys et al., 2016; Zabunov and Mardirossian, 2018; Zabunov et al., 2021A). The rotors are positioned in an optimal geometric coverage thus minimizing the dimensions of the UAV – an important feature when flying indoors.
The navigation and control of the vehicle and its payload is performed by a specialized autopilot (Zabunov 2016; Zabunov 2019).
This design is very different from the standard designs that rely on four to eight rotors. The higher number of rotors ensures high reliability and low probability of damages upon impact or disintegration of the vehicle. The higher number of rotors also leads to higher mechanical vibrations frequencies. These are easy to filter mechanically thus not disturbing the work of the avionics and the payload. Higher frequencies also decay quicker with distance when transferred into air as sound waves, leading to the UAV being harder to spot by acoustic signature (Marichal et al., 2014; Radkowski and Szulim, 2013; Verbeke and Debruyne, 2016).
The dimensions of the aircraft are suitable for flight in confined spaces and allow the vehicle to pass through doors and windows. The dimensions are 455x430x100 mm (Figure 5).
Still another development taking place at the Space Research and Technology Institute – Bulgarian Academy of Sciences is an unmanned aerial system for detection of harmful gas sources in the atmosphere as a result of non-regulated incineration (Mardirossian et al., 2020). The innovation was patented at the Bulgarian Patent Office as a utility model. It is related to an unmanned aerial system for detection and localization of sources of harmful gasses. These gasses are released into the atmosphere due to unregulated incineration by the industry, households, individuals, etc. The application of the invention is in the control of such accidents or regular pollution sources. In the process of control the most valuable capability of the system is to detect and localize the source and while staying unnoticed by the culprit. Such an approach gives time to the authorities to engage and reach the location of the accident, take measures and uncover the identity of the individuals involved in the incineration process.
The illegal incineration of different materials is very dangerous for public health and, when done at large scale, leads to illnesses such as asthma (Pamukoff-Michelson, 2021A), hormonal disorders and other diseases (Tzaribachev and Pamukoff-Michelson, 2021; Pamukova and Vizeva, 2019). The system is applicable mainly in urban environment but is not limited and can be implemented in the countryside or in distant areas where special industrial facilities perpetrate non-regulated incinerations of materials and chemical substances.
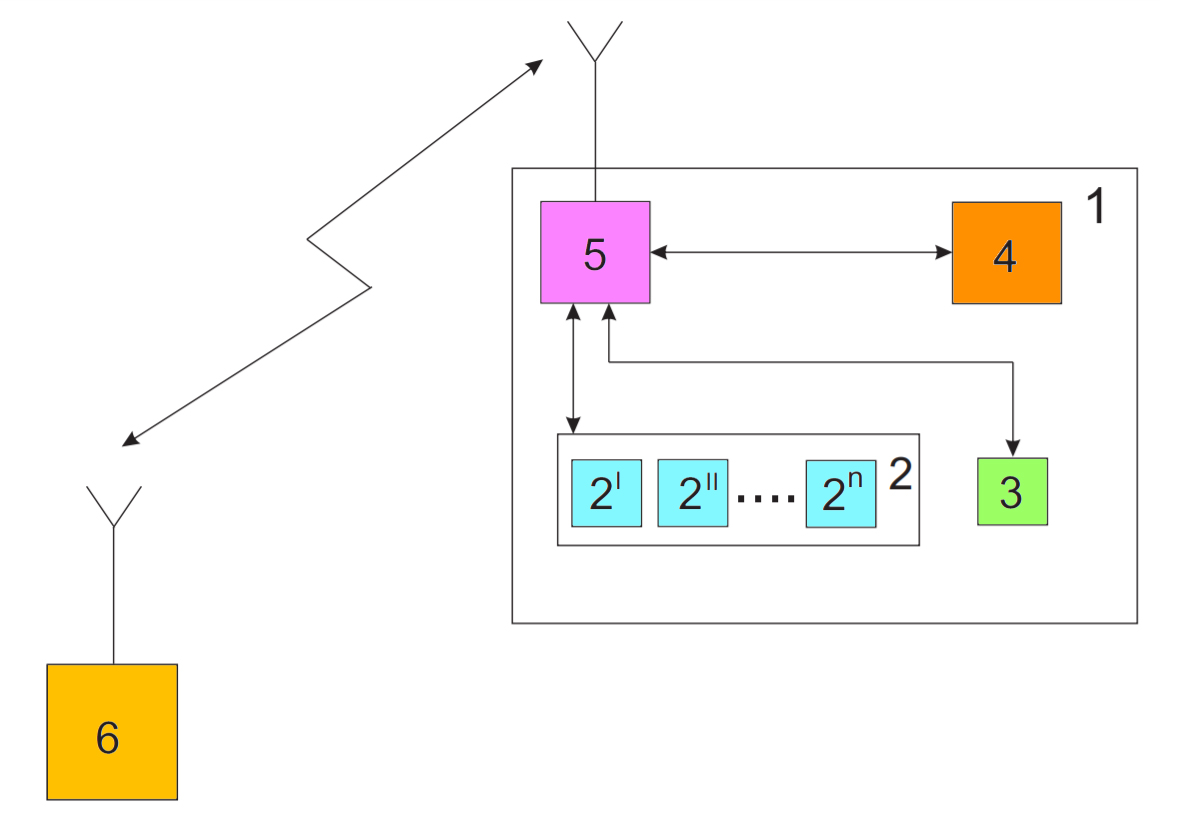
The block schematic diagram of the system is presented in Figure 6. The system consists of an unmanned aerial vehicle (1). The vehicle is carrying gas analyzers onboard (2). Another part of the payload is a camera for observing the terrain (3). Navigation is realized by means of a GPS module (4) and an autopilot (5). The UAV is controlled using a base station. The latter is also employed in information reception from the aircraft (6).
|
Figure 6. An unmanned aerial system for detection of harmful gas sources in the atmosphere as a result of non-regulated incineration. Image © Space Research and Technology Institute – Bulgarian Academy of Sciences.
Conclusions
The management of nuclear disasters and accidents with facilities dealing with ionizing radiation sources requires adequate technologies and systems. Without modern solutions and relying on human force alone, final results are non-optimal while people are exposed to high risks.
With urban air pollution becoming a worldwide threat to human health, specialized system for monitoring and analysis of air pollution above large cities and small towns is much needed. Management of environmental disasters over urban areas will decrease population health problems related to poisoning from air pollutants and will improve quality of life in big cities.
References
- Anderson, C. (1990). "Soviet Official Admits That Robots Couldn't Handle Chernobyl Cleanup", The Scientist, Canada, June 21, 2016.
- Ashida, Y., Nagata, H., Koshio, Y., Nakaya, T. and Wendell, R. (2018), “Separation of gamma-ray and neutron events with CsI(Tl) pulse shape analysis”. Prog. Theor. Exp. Phys. 2018, 043H01, pp. 1–9
- Battsengel, G., Geetha S. and Jeon J. (2020), “Analysis of Technological Trends and Technological Portfolio of Unmanned Aerial Vehicle”, J. Open Innov. Technol. Mark. Complex. 2020, 6, 48, pp. 1–14
- Berberova, R. (2012). Natural Disasters in Bulgaria – Status and Trends. New Bulgarian University, Sofia, 147 p. ISBN 978-954-535-699-5
- Berger, E.M. (2010) “The Chernobyl Disaster, Concern about the Environment, and Life Satisfaction”, KYKLOS, vol. 63 – February 2010 – No. 1, pp. 1–8.
- Bird, B., Griffiths, A., Martin, H., Codres, E., Jones, J., Stancu, A., Lennox, B., Watson, S. and Poteau, X. (2019), “A Robot to Monitor Nuclear Facilities”, IEEE ROBOTICS & AUTOMATION MAGAZIN, 1070-9932/19©2019IEEE, pp. 35–43, March 2019.
- Boudergui, K. et al. (2011), “Development of a drone equipped with optimized sensors for nuclear and radiological risk characterization”, 2011 2nd International Conference on Advancements in Nuclear Instrumentation, Measurement Methods and their Applications, Ghent, Belgium, 2011, pp. 1–9
- Chaiyasoonthom, S., Hongyim, N. and Mitatha, S. (2015), “Building Automatic Packet Report System to report position and radiation data for autonomous robot in the disaster area”, 15th International Conference on Control, Automation and Systems (ICCAS 2015), Oct. 13-16, 2015 in BEXCO, Busan, Korea, pp. 85–88.
- Connor, D., Martin, P. G. and Scott, T. B. (2016), “Airborne radiation mapping: overview and application of current and future aerial systems”, International Journal of Remote Sensing, Vol 37, 2016, Issue 24, pp. 5953–5987
- Connor, D. T., Wood, K., Martin, P. G., Goren, S., Megson-Smith, D., Verbelen, Y., Chyzhevskyi, I., Kirieiev, S., Smith, N. T., Richardson, T., Scott, T. B. (2020), “Radiological Mapping of Post-Disaster Nuclear Environments Using Fixed-Wing Unmanned Aerial Systems: A Study From Chornobyl”, Frontiers in Robotics and AI, Vol. 6, 2020, pp. 1–35
- Croon, G. de and Wagter, C. De (2018). Challenges of Autonomous Flight in Indoor Environments, 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, pp. 1003–1009
- Dudar, A.M., Wagner, D.G., Teese, G.D. (1994), “AUTONOMOUS MOBILE ROBOT FOR RADIOLOGIC SURVEYS”, United States Patent, Patent Number: 5,324,948, Date of Patent: Jun. 28, 1994
- Garcia-Sanchez, A.-J., Angosto, E.A.G., Riquelme, P.A.M., Berna, A.S. and Ramos-Amores, D. (2018), “Ionizing Radiation Measurement Solution in a Hospital Environment”, Sensors 2018, 18, 510, pp. 1–32
- Getsov, P., (2014). National Aerospace System for Monitoring and Protection against Natural Disasters. Professor Marin Drinov Publishing House of BAS, Sofia, 231 p.ISBN 978-954-322-745-7
- Gjurov, R., R. Berberova (2008). Otsenka Assessment of the Risk of Ecological Catastrophe On the Territory of Elin Pelin Municipality from Flooding With Radioactive Contaminants After Flood. Proceedings of VII International Symposium "Ecology-Sustainable Development", SU-Vratsa, 122-125.
- Gjurov, R., R. Berberova, A. Bliznakov, H. Harizanov (2008). Study of the Impact of Radioactive Sites in the Area of Novi Khan, Krushovishta and Gabra On the Environment and Human Health. Proceedings of VII International Symposium "Ecology-Sustainable Development", SU-Vratsa, 110-121.
- Kawatsuma, S., Fukushima, M., Okada, T. (2012), “Emergency response by robots to Fukushima-Daiichi accident: summary and lessons learned”, Industrial Robot: An International Journal, Vol. 39, Iss. 5, pp. 428–435.
- Kawatsuma, S., Mimura, R. and Asama, H. (2017). Unitization for portability of emergency response surveillance robot system: Experiences and lessons learned from the deployment of the JAEA-3 emergency response robot at the Fukushima Daiichi Nuclear Power Plants, ROBOMECH J., vol. 4, no. 1, pp. 1–7, Feb. 2017
- Khosiawan, Y. and Nielsen, I. (2016), A system of UAV application in indoor environment, Production & Manufacturing Research, Vol. 4, Issue 1, 2016, pp. 2–22
- Kim, D., Woo, H., Ji, Y., Tamura, Y., Yamashita, A. and Asama, H. (2017), “3D Radiation Imaging Using Mobile Robot Equipped with Radiation Detector”, Proceedings of the 2017 IEEE/SICE International Symposium on System Integration, Taipei, Taiwan, December 11–14, 2017, pp. 444–449.
- Kostova, D., R. Berberova. (2009). Ecology and Geoinformation Systems (GIS). Ecological Engineering and Environment Protection, Book 3-4/2009, pp. 102–106. ISSN 1311-8668
- Lauria, M. et al. (2006), Design and Control of a Four Steered Wheeled Mobile Robot, IECON 2006 - 32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 2006, pp. 4020–4025
- Leite, F.G.H. et al. (2017), Ionizing Radiation Effects on a COTS LowCost RISC Microcontroller, 2017 18th IEEE Latin American Test Symposium (LATS), pp. 1–4
- Mardirossian G. (2020). Natural Disasters and Ecological Catastrophes - Study, Prevention, Protection (Third revised and supplemental edition). Prof. M. Drinov Acad. Publ. House, Sofia, 2020, 353 p. ISBN 978-619-245-013-7
- Mardirossian G. (1992). From Space against the Ecological Catastrophes. Publ. of BAS, 208 p. ISBN 954-430-167-4
- Mardirossian G., S. Zabunov, P. Getsov, G. Sotirov, V. Vasev, I. Valchinov. (2020). Unmanned Aerial System for Detection of Harmful Gas Sources in the Atmosphere as a Result of Non-regulated Incineration, Bulgarian Patent Office, Utility model #3723, registered on 30th of April, 2020.
- Marichal, G. N., Rodriguez, M. T., Hernández, Á., Rivera, S. C. and Campoy, P. (2014), “Vibration reduction for vision systems on board unmanned aerial vehicles using a neuro-fuzzy controller”, Journal of Vibration and Control. Vol. 20, 2014, Issue 15, pp. 2243–2253
- Martin P. G., Kwong, S., Smith, N. T., Yamashiki, Y., Payton, O. D., Russell-Pavier, F. S., Fardoulis, J. S., Richards, D. A., Scott, T. B. (2016), “3D unmanned aerial vehicle radiation mapping for assessing contaminant distribution and mobility”, International Journal of Applied Earth Observation and Geoinformation, v. 52, 2016, pp. 12–19
- Mihaylov, Ch., R. Pamukoff – Michelson. (2021). Effect of the Bulgarian Phytopreparations Broncho Pam and Immuno Broncho Pam in Therapies of Bronchitis and Bronchial Asthma after Acute Viral Infections in Children. Child and Infectious Diseases, Issue 2/2021, pp. 15—20. ISSN: 1313-762Х
- Mochizuki, S., Kataoka, J., Tagawa, L., Iwamoto, Y., Okochi, H., Katsumi, N., Kinno, S., Arimoto, M., Maruhashi, T., Fujieda, K., Kuriharaa, T. and Ohsukab, S. (2017), “First demonstration of aerial gamma-ray imaging using drone for prompt radiation survey in Fukushima”, Journal of Instrumentation, 12 P11014
- Molina, M., Campos, V., Montagud, M. and Molina B. (2018), Ethics for civil indoor drones: A qualitative analysis, International Journal of Micro Air Vehicles, 2018, Vol. 10(4) pp. 340–351
- Nagatani, K., et al. (2013). Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots, J. Field Robot, vol. 30, no. 1, Jan./Feb. 2013, pp. 44–63
- Nex, F. and Remondino, F. (2019). Preface: Latest Developments, Methodologies, and Applications Based on UAV Platforms, Drones 2019, 3(1), 26, pp. 1–3
- Pamukoff-Michelson, R. (2020). Salvia officinalis: antimicrobial activity against coronaviruses and other pathogens. Application in respiratory diseases. General Medicine, Issue 4/2020, pp. 80—84. ISSN 1311-1817
- Pamukoff-Michelson, R. (2021A). Asthma – a rising socially significant disease caused by environmental factors. Prevention and therapy with Bulgarian phytotherapy. SPACE, ECOLOGY, SAFETY (SES) 2021: Proceedings of Annual International Scientific Conference – Sofia, Space Research and Technology Institute – Bulgarian Academy of Sciences, pp. 336—341. ISSN 2603-3313 (print), 2603-3321 (online)
- Pamukoff-Michelson, R. (2021B). Some Risk Factors for Overweight and Obesity. The Positive Role of Healthy Sleep and Effectiveness of Bulgarian Phytoprepapy. Nauka, 2021, Issue 4/2021, pp. 56—63. ISSN 2603-3623
- Pamukova, R. (2017). Genes and hormones, related to obesity. Medical Meridians, 2017, Issue 2017/2, pp. 34—41. ISSN 1314—1090
- Pamukova, R. (2016A). Results from a Comprehensive Study about the Impact from Natural Lifestyle and Slim Pam on People with Overweight and Obesity. Health Policy and Management, 2016, Issue 3, pp. 31—37 ISSN 1313-4981
- Pamukova, R. (2016B). Impact of Phytotherapy on People with Overweight and Obesity – Comprehensive Study. Medicus 2016, Issue 4 (10), pp. 8—19. ISSN 2409—563X
- Pamukova, R. (2016C). Diabetes Mellitus and Obesity – Current Aspects. General Medicine, Issue 1/2016, pp. 35—40. ISSN 1311—1817
- Pamukova, R. (2016D). Innovative Method for Overweight Reduction, Improving Quality of Life in Patients. ITI – Inventions, Transfer, Innovations, Issue 1–2 (14–15), pp. 11—17. ISSN 1313—9657
- Pamukova, R., M. Vizeva (2019). The Third Wave and Future Trends in Public Health. Folia Medica, 2019, Vol. 61, Suppl. 1, p. 66. ISSN 0204-8043 (print), ISSN 1314—2143 (online)
- Radkowski, S. and Szulim, P. (2013), “Analysis of vibration of rotors in unmanned aircraft”, 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR). pp. 748–753
- Seco, J., Clasie, B. and Partridge, M. (2014), “Review on the characteristics of radiation detectors for dosimetry and imaging”, Physics in Medicine and Biology 59(20), pp. R303–R347
- Semkova et al. (2018), “Charged particles radiation measurements with Liulin-MO dosimeter of FREND instrument aboard ExoMars Trace Gas Orbiter during the transit and in high elliptic Mars orbit”, Icarus 303 (2018), pp. 53–66.
- Spur, F. and Dachev, Ts. (2003),” Long-term Monitoring of the Onboard Aircraft Exposure Level with a Si-Diode Based Spectrometer”, Adv. Space Res., Vol. 32, No. 1, 2003, pp. 53–58
- Spurný, F. (2005), “Response of a Si-diode-based device to fast neutrons”, Radiation Measurements 39 (2005) pp. 219–223
- Theys, B., Dimitriadis, G., Hendrick, P. and DeSchutter, J. (2016), “Influence of propeller configuration on propulsion system efficiency of multi-rotor Unmanned Aerial Vehicles”, 2016 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 195–201
- Tzaribachev, N., R. Pamukoff-Michelson (2021). Research of The Effect of the Bulgarian Phytopreparation GASTROPAM in Diseases of the Digestive System. Child and Infectious Diseases, Issue 2/2021, pp. 11—14. ISSN 1313-762Х
- Verbeke, J. and Debruyne, S. (2016), “Vibration analysis of a UAV multirotor frame”. International Conference on Noise and Vibration Engineering. pp. 2329–2338
- Yoon, S., Nasa, Diaz, P., Boyd, D., Chan, W. and Theodore, C. R. (2017), “Computational aerodynamic modeling of small quadcopter vehicles”, 73rd Annual AHS International Forum and Technology Display, 2017 (AHS Forum 73), pp. 1–16
- Zabunov, S. (2016), “Quaternion-based Autopilot for Dodecacopters - Part I”, Aerospace Research in Bulgaria, 28, 2016, Sofia, pp. 93–112
- Zabunov, S. (2019), “Quaternion-based Autopilot for Dodecacopters - Part II”, Aerospace Research in Bulgaria, 31, 2019, Sofia, pp. 91–98
- Zabunov, S. and Mardirossian, G. (2018). Innovative Dodecacopter Design – Bulgarian Knight, International Journal of Aviation, Aeronautics, and Aerospace, 5(4). pp. 1–16
- Zabunov, S., Mardirossian, G., Miteva, R., & Kunchev, T. (2021A). Internet of Things 36-rotor Multicopter for Ionizing Radiation Surveying. International Journal of Aviation, Aeronautics, and Aerospace, 8(2), 2021. https://doi.org/10.15394/ijaaa.2021.1585
- Zabunov, S., Mardirossian, G., Miteva, R., Kunchev, T., & Pamukoff-Michelson, R. (2021B). Internet-Of-Things Sensor for Ionizing Radiation Inspection in Confined Spaces. Comptes rendus de l’Academie bulgare des Sciences. Tome 74, No 10, 2021, pp. 1519—1528.
- Zakaria, A.H., Mustafah, Y.M., Abdullah, J., Khair, N. and Abdullah, T. (2016). Development of Autonomous Radiation Mapping Robot, 2016 IEEE International Symposium on Robotics and Intelligent Sensors, IRIS 2016, 17-20 December 2016, Tokyo, Japan, pp. 81–86.
- Zarowny, A. (2011). Lunokhod: From the Moon to Chernobyl, the Little Robot That Could! Right Pundits, 2011.